General description of the walking machine project
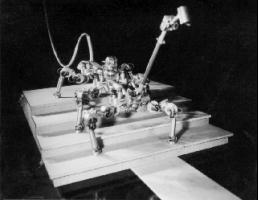
Name of the walking machine/project: MASCHA Begin and end of the Project: Jan. 1971 - Dec. 1994 Project costs:7000 DM Building effort [person years]: 5 Source of financial support: Research Project funded by the Russia Academy of Science and by the Institute IPPI and Institute IMech Research group 1. Institute of Mechanics Lomonnossow-University (IMech) 2. Institute of Data Transmission (IPPI) Staff of the project: Prof.Dr.math.habil. D.E. Okhotsimsky (director) Prof.Dr.math.habil E.A. Devjanin (director) Prof.Dr.med.habil V.S. Gurfinkel (director) Dr.math. A.V. Lensky Dr.math. L.G. Shtilman Information via www: Contact address: Prof.Dr. E.A. Devjanin, Institute of Mechanics (IMech), Lomonnossow-University 1 Mitchurinsky Prospekt, 147192 Moscow, Russia Tel: ++7(095) 939 32 74, Fax: ++7(095) 938 22 15 Technical data of the walking machine Dimension Capacity Mobility Energy supply Length 0.7m Max. speed 0,14m/s Number of legs 6 Energy supply DC Height 0,21m Weight 20kg Act. degrees of freedom 20 Power supply - Width 0.7m Load 5kg Pas. degrees of freedom 18 Power consumption 130Watt References [Bogutsky et al., 1994, Devjanin et al., 1973, Devjanin et al., 1987, Gorinevsky and Schneider, 1990, Okhotsimski et al., 1978]
Research group
1. Institute of Mechanics Lomonnossow-University (IMech) 2. Institute of Data Transmission (IPPI)
Staff of the project:
Prof.Dr.math.habil. D.E. Okhotsimsky (director) Prof.Dr.math.habil E.A. Devjanin (director) Prof.Dr.med.habil V.S. Gurfinkel (director) Dr.math. A.V. Lensky Dr.math. L.G. Shtilman
Information via www:
Contact address:
Prof.Dr. E.A. Devjanin, Institute of Mechanics (IMech), Lomonnossow-University 1 Mitchurinsky Prospekt, 147192 Moscow, Russia Tel: ++7(095) 939 32 74, Fax: ++7(095) 938 22 15
Technical data of the walking machine
References
[Bogutsky et al., 1994, Devjanin et al., 1973, Devjanin et al., 1987, Gorinevsky and Schneider, 1990, Okhotsimski et al., 1978]